







Мошини пармакунии CNC PLD2016 барои плитаҳои пӯлодӣ




| Ашё | Ном | Арзиш |
| Андозаи табақ | Ғафсии табақ | Максимум 100 мм |
| Паҳноӣ * Дарозӣ | 2000мм×1600мм (Як қисм) | |
| 1600мм * 1000мм (Ду дона) | ||
| 1000мм×800мм(Чаҳор дона) | ||
| шпиндели пармакунӣ | Патрон барои пармакунии зуд ивазшаванда | Морзе 3⼃,4⼃ |
| Диаметри сари пармакунӣ | Φ12мм-Φ50мм | |
| Реҷаи танзими суръат | Танзими суръати беқадами трансдюсер | |
| RPM | 120-560 чарх/дақ | |
| Инсулт | 180 мм | |
| Силоҳи гидравликӣ | Ғафсии часпак | 15-100 мм |
| Миқдори силиндраи часпак | 12 дона | |
| Қувваи фишурдан | 7.5 кН | |
| Моеъи хунуккунӣ | Режим | Давраи маҷбурӣ |
| Мотор | Шпиндел | 5.5 кВт |
| Насоси гидравликӣ | 2.2 кВт | |
| Мотор барои тоза кардани чип | 0.75 кВт | |
| Насоси хунуккунӣ | 0.25 кВт | |
| Системаи сервои меҳвари X | 1.5 кВт | |
| Системаи сервои меҳвари Y | 1.0 кВт | |
| Андозаҳои умумӣ | Ч*Ч*Б | Тақрибан 5183*2705*2856мм |
| Вазн (кг) | Мошини асосӣ | Тақрибан 4500 кг |
| Дастгоҳи тозакунии партовҳо | Тақрибан 800 кг | |
| Сафар | Меҳвари X | 2000 мм |
| Меҳвари Y | 1600 мм |
1. Мошин асосан аз кат (мизи корӣ), портал, сари пармакунӣ, платформаи слайдҳои тӯлонӣ, системаи гидравликӣ, системаи идоракунии барқӣ, системаи молидании марказӣ, системаи тозакунии чипҳои хунуккунӣ, патрони зуд ивазшаванда ва ғайра иборат аст.
2. Портал ҳангоми мустаҳкам будани кат ҳаракат мекунад. Плитаҳо бо фишангҳои гидравликӣ маҳкам карда мешаванд, ки онҳоро бо тугмаи пой ба осонӣ идора кардан мумкин аст, плитаи хурд метавонад чор гурӯҳро дар кунҷҳои мизи корӣ ба ҳам часпонад, то давраи омодасозии истеҳсолотро кам кунад ва самаранокиро ба таври назаррас беҳтар созад.
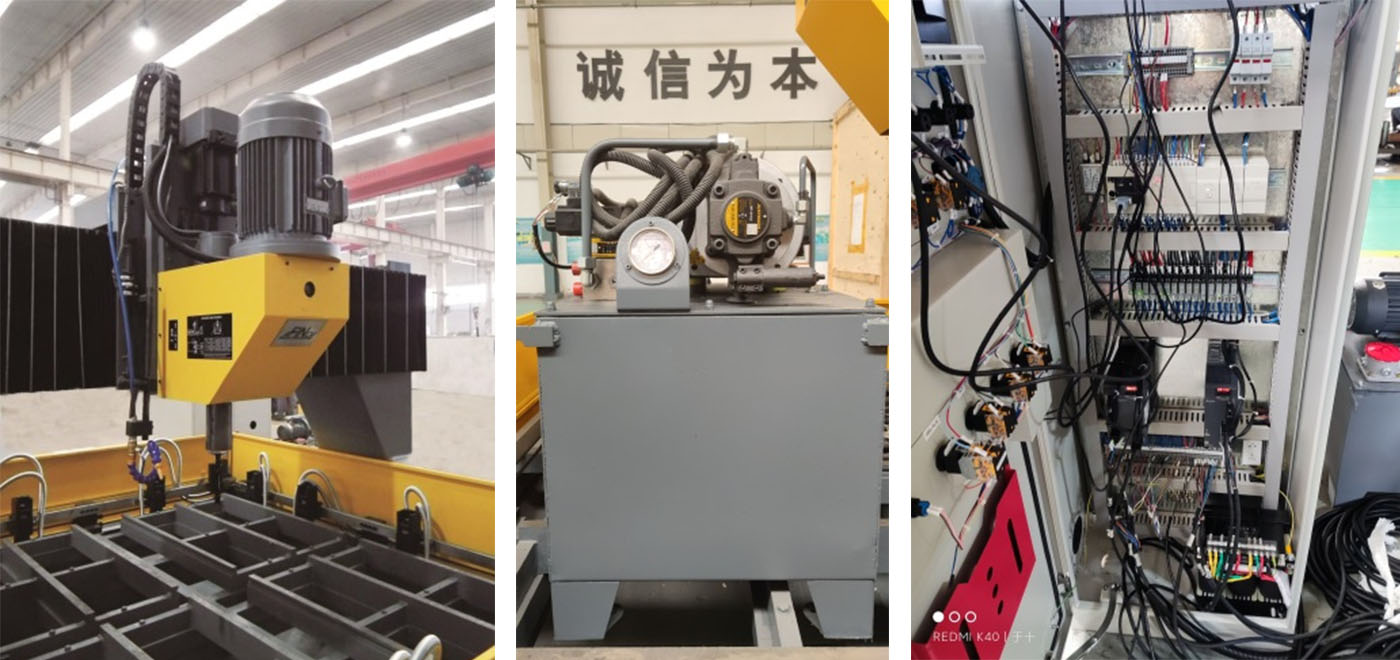
3. Мошин аз ду меҳвари CNC иборат аст, ки ҳар яки онҳо бо роҳнамои ғалтаки хаттии дақиқи баланд, ки аз ҷониби муҳаррики сервои AC ва винти курашакл идора карда мешавад, идора карда мешавад.
4. Мақсади мошин сари қудрати пармакунии зарбаи идоракунии автоматии гидравликиро қабул мекунад, ки технологияи патентшудаи ширкати мост, пеш аз истифода ягон параметр муқаррар кардан лозим нест.
5. Мақсади мошин сарлавҳаи пармакунии зарбаи автоматии гидравликиро истифода мебарад, ки технологияи патентшудаи ширкати мо мебошад. Пеш аз истифода ягон параметрро муқаррар кардан лозим нест. Тавассути амали муштараки электрогидравликӣ, он метавонад ба таври худкор табдили кори зуд ба пеш ва зуд ба қафоро анҷом диҳад ва амалиёт содда ва боэътимод аст.

6. Ин мақсади мошин ба ҷои кори дастӣ системаи молидании марказонидашударо қабул мекунад, то қисмҳои функсионалӣ хуб равған карда шаванд, кори асбоби мошинро беҳтар кунанд ва мӯҳлати хизмати онро дароз кунанд.
7. Ду усули хунуккунии дохилӣ ва хунуккунии беруна таъсири хунуккунии сари пармаро таъмин мекунанд. Чипҳоро ба таври худкор ба аробаи партов партофтан мумкин аст.
Системаи идоракунӣ нармафзори болоии барномасозии компютериро қабул мекунад, ки аз ҷониби ширкати мо мустақилона таҳия шудааст ва бо контроллери барномарезишаванда мувофиқ карда шудааст, ки дараҷаи баланди автоматизатсия дорад.
| НЕ. | Ном | Бренд | Кишвар |
| 1 | Роҳнамои хаттӣ | CSK/HIWIN | Тайван (Чин) |
| 2 | Насоси гидравликӣ | Танҳо Марк | Тайван (Чин) |
| 3 | Клапани электромагнитӣ | Атос/ЮКЕН | Италия/Ҷопон |
| 4 | Мотори серво | Инованс | Чин |
| 5 | Ронандаи серво | Инованс | Чин |
| 6 | ҶДММ | Инованс | Чин |
| 7 | Компютер | Леново | Чин |
Эзоҳ: Дар боло маҳсулот таъминкунандаи стандартии мост. Агар маҳсулот таъминкунандаи дар боло зикршуда дар сурати пайдо шудани ягон мушкили махсус маҳсулотро таъмин карда натавонад, он метавонад бо маҳсулоти дорои сифати якхелаи бренди дигар иваз карда шавад.



Профили мухтасари ширкат  Маълумот дар бораи завод
Маълумот дар бораи завод  Иқтидори истеҳсолии солона
Иқтидори истеҳсолии солона  Қобилияти тиҷоратӣ
Қобилияти тиҷоратӣ 
Категорияҳои маҳсулот
-

Мошини пармакунии табақаи CNC мобилии PLD3020N Gantry
-

Пармакунии пластинкаи CNC барои мобилии дукаратаи PD16C ...
-

Мошини пармакунии табақаи CNC-и сайёри PLD3016 Gantry
-

Мошини пармакунии CNC PD30B барои плитаҳо
-

Мошини пармакунии баландсуръати PHD2016 CNC барои Ste ...
-

Ҳуҷҷати техникии PDDL2016 Type Intelligent...