







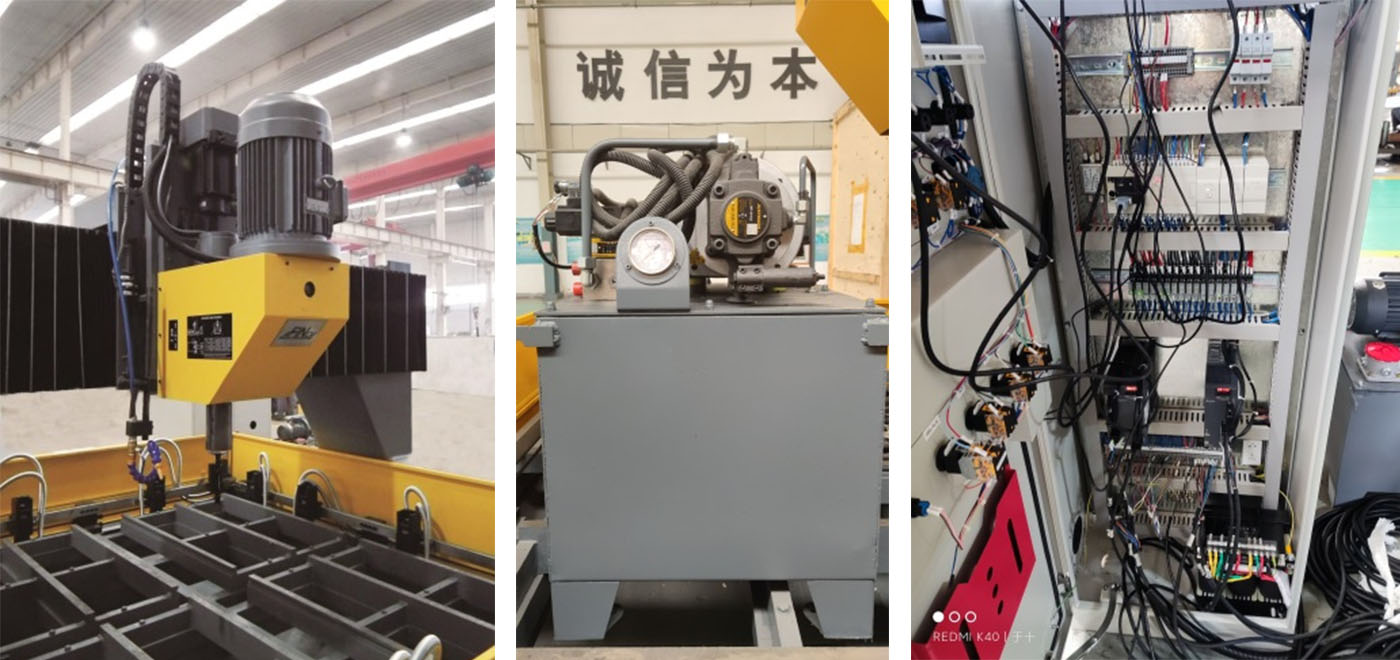
Мошини пармакунии CNC-и сайёри PLD3030A&PLD4030 Gantry




| Iноми вақтӣ | Параметр | ||
| PLD3030A | PLD4030 | ||
| Коркарди ҳадди аксартабақандоза | Дарозӣ x Паҳноӣ | 3000x3000 мм | 4000*3000мм |
| Ғафсӣ | 200 мм | 100 мм | |
| Кормиз | Андозаи паҳнои чуқурчаи Т-шакл | 22 мм | |
| Сари қувваи пармакунӣ | Qвантӣ | 2 | 1 |
| Пармакунии максималӣсӯрохӣдиаметр | Φ12mm-Φ50 мм | ||
| RPM(табдилдиҳии басомад) | 120-450 чархзанӣ/дақ | ||
| Конуси Морзеи шпиндель | № 4 | ||
| Қувваи муҳаррики шпиндель | 2x7.5 кВт | 5.5 кВт | |
| Масофа аз сатҳи поёниишпиндельба мизи корӣ | 200-550 мм | ||
| Ҳаракати тӯлонии гантри (X-меҳвар) | Саёҳати меҳвари X | 3000 мм | |
| Суръати ҳаракати меҳвари X | 0-8м/дақ | ||
| Қувваи муҳаррики сервои меҳвари X | 2x2.0 кВт | ||
| Дурустии ҷойгиркунии меҳвари X | 0.1мм/пурра | ||
| Ҳаракати паҳлӯии сари қудрат (Меҳвари Y) | Масофаи максималӣ байни ду сари қудрати меҳвари Y | 3000 мм | |
| Масофаи ҳадди ақал байни ду сари қудрати меҳвари Y | 470 мм | ||
| Қувваи муҳаррики сервои меҳвари Y | 1.5 кВт | ||
| Ҳаракати сари барқ | Саёҳати меҳвари Z | 350 мм | |
| Қувваи муҳаррики сервои меҳвари Z | 2*2кВт | ||
| Конвейери чип ва хунуккунӣ | Қувваи муҳаррики конвейери чипӣ | 0.75 кВт | |
| Қувваи муҳаррики насоси хунуккунӣ | 0.45 кВт | ||
| Eсистемаи барқӣ | Қувваи умумии муҳаррик | Тақрибан 30 кВт | Дар бораи20 кВт |
| Андозаҳои умумии асбобҳои мошинӣ | Тақрибан 6970x6035x2990 мм | ||
1. Диаметри максималии пармакунии асбоби дастгоҳ 50 мм, ғафсии максималии лавҳаи пармакунӣ 200 мм ва андозаи максималии лавҳа 3000x3000 мм аст.
2. Асбоби мошин бо ду сарлавҳаи мустақили пармакунии слайдҳои серво муҷаҳҳаз шудааст.
3. Мавқеи координатии сӯрохро бо суръати 8м / дақиқа зуд ҷойгир кардан мумкин аст ва вақти ёрирасон нисбатан кӯтоҳ аст.
4. Моторҳои шпинделии сари қувваи пармакунӣ танзими суръати табдили басомади беқадамро қабул мекунанд ва суръати ғизодиҳӣ танзими суръати беқадамро дар серво қабул мекунад, ки барои истифода қулай аст.
5. Пас аз муқаррар кардани зарбаи ғизодиҳии пармакунӣ, он функсияи идоракунии автоматӣ дорад.
6. Сӯрохи конуси шпиндель Morse № 4 аст ва бо ғилофи редуктори Morse № 4/3 муҷаҳҳаз шудааст, ки метавонад пармакуниро бо диаметрҳои гуногун насб кунад.
7. Сохтори сайёри гантри қабул карда шудааст, мошин майдони хурдро фаро мегирад ва тарҳбандии сохторӣ мувофиқ аст.

8. Ҳаракати меҳвари X-и гантри роҳнамоии ҷуфти роҳи оҳани ғалтакдори хаттии иқтидори баланди борбардориро қабул мекунад, ки чандир аст.
9. Мошин бо дастгоҳи танзимкунандаи асбоби пружинаи марказӣ муҷаҳҳаз шудааст, ки метавонад мавқеи табақро ба осонӣ муайян кунад.
10. Системаи идоракунӣ нармафзори болоии барномасозии компютериро, ки аз ҷониби ширкати мо мустақилона таҳия шудааст ва бо контроллери барномарезишавандаи PLC мувофиқ карда шудааст, бо дараҷаи баланди автоматизатсия қабул мекунад.
11. Роҳи роҳнамои мошин ва гайкаи винти сурб бо дастгоҳи равғандиҳии автоматӣ муҷаҳҳаз шудаанд.
12. Релси роҳнамои меҳвари X аз пӯлоди зангногир сарпӯши муҳофизатии телескопӣ мегирад, ҳарду тарафи релси роҳнамои меҳвари Y сарпӯши муҳофизатии чандирро истифода мебарад ва дар атрофи мизи корӣ монеаи обногузар илова карда шудааст.
| НЕ. | Ном | Бренд | Кишвар |
| 1 | Lроҳи оҳани роҳнамои гӯшӣ | HIWIN/PMI | Тайван, Чин |
| 2 | Ронандаи серво | Митсубиси | Ҷопон |
| 3 | Sмуҳаррики эрво | Митсубиси | Ҷопон |
| 4 | Контроллери барномарезишаванда | Митсубиси | Ҷопон |
| 5 | Дастгоҳи равғандиҳии худкор | БИҶУР/ҲЕРГ | ИМА / Ҷопон |
| 6 | Cкомпютер | Леново | Чин |
Эзоҳ: Дар боло маҳсулот таъминкунандаи стандартии мост. Агар маҳсулот таъминкунандаи дар боло зикршуда дар сурати пайдо шудани ягон мушкили махсус маҳсулотро таъмин карда натавонад, он метавонад бо маҳсулоти дорои сифати якхелаи бренди дигар иваз карда шавад.



Профили мухтасари ширкат  Маълумот дар бораи завод
Маълумот дар бораи завод  Иқтидори истеҳсолии солона
Иқтидори истеҳсолии солона  Қобилияти тиҷоратӣ
Қобилияти тиҷоратӣ 
Категорияҳои маҳсулот
-

Мошини пармакунии баландсуръати CNC PHD3016&PHD4030 ...
-

Ҳуҷҷати техникии PDDL2016 Type Intelligent...
-

Мошини пармакунии баландсуръати PHD1616S CNC барои St ...
-

Мошини пармакунии CNC PHD2020C барои плитаҳои пӯлодӣ
-

Пармакунии пластинкаи CNC барои мобилии дукаратаи PD16C ...
-

Мошини пармакунии табақаи CNC-и сайёри PLD3016 Gantry